
自動運転の仕組み
自動運転は、車両の現在位置を正確に特定する技術(位置特定技術)、障害物や歩行者などの動きを検知する技術(認識技術)の他、事故のリスクを予測して運転操作の判断をする技術など、様々な技術を組合せることで、安全で快適な運行を実現します。
自動運転に関する国の動向や関係法令などの詳細については第1回協議会資料2をご覧ください。
(1)位置特定技術
車両位置を特定する技術には、主に磁気マーカー・電磁誘導線、GNSS、高精度3次元地図があります。
実施主体により、これらの技術を単独で利用したり、複数の技術を組合せて利用したりして、位置特定を行っています。
R2年度茂木町での実証実験では、GNSSと高精度3次元地図を組み合せた仕組みを採用しています。
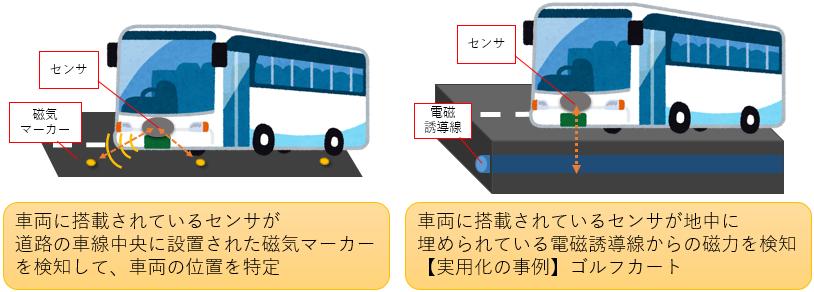
 磁気マーカー・電磁誘導線
予め道路に磁気マーカーや電磁誘導線を設置し、車両側のセンサで検知することで自己位置を特定
磁気マーカー・電磁誘導線
予め道路に磁気マーカーや電磁誘導線を設置し、車両側のセンサで検知することで自己位置を特定
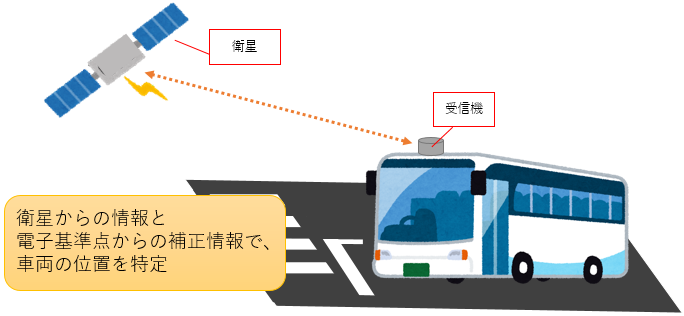
 GNSS
衛星からの情報をもとに自己位置を特定
GNSS
衛星からの情報をもとに自己位置を特定
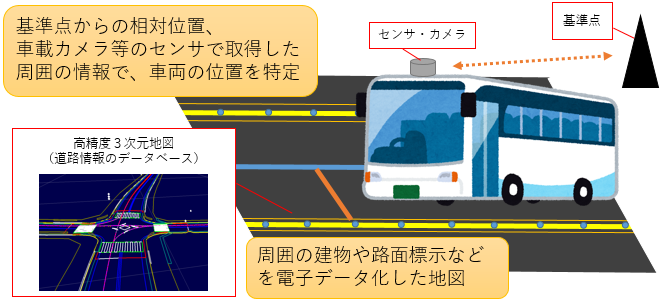
 高精度3次元地図
周囲の建物や路面標示などを電子データ化した道路情報データベースである高精度3次元地図を基に、基準点からの情報と車載カメラ等による周囲の地物との関係から自己位置を特定
高精度3次元地図
周囲の建物や路面標示などを電子データ化した道路情報データベースである高精度3次元地図を基に、基準点からの情報と車載カメラ等による周囲の地物との関係から自己位置を特定
※ 国土交通省の資料(http://www.mlit.go.jp/common/001294006.pdf)を基に作成
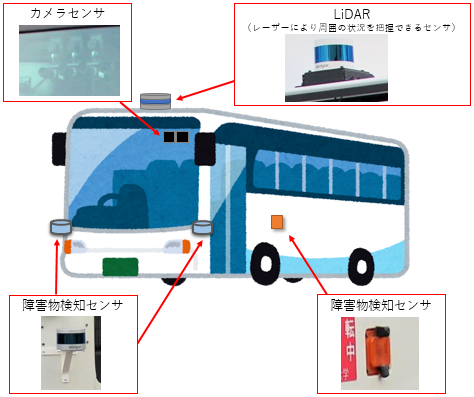
(2)認識技術
車両の周囲の状況は車両に設置された全方位を対象とするカメラやセンサを用いて把握します。
人の飛び出しや路上駐車などの車道上の障害となるものを検知し、安全な走行を実現します。
画像提供:アイサンテクノロジー
![]()
栃木県無人自動運転移動サービス推進協議会

栃木県県土整備部交通政策課公共交通担当
320-8501栃木県宇都宮市塙田1-1-20
電話番号:028-623-2447
Email:abc-project@pref.tochigi.lg.jp